RX2635H using the ITG-3205 mems gyro
Sunday, April 12, 2015
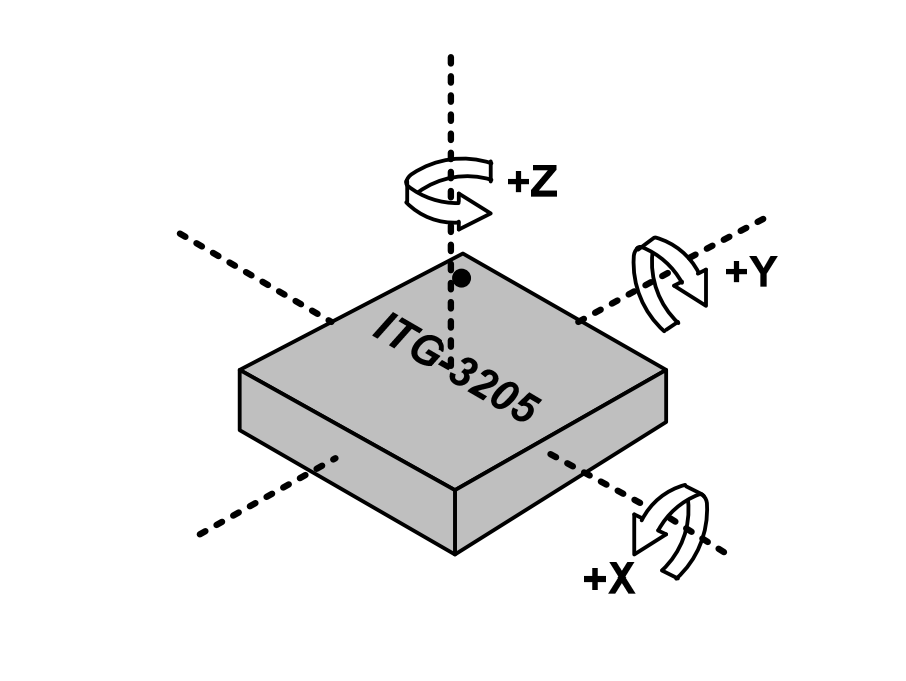
One of the important parts of a quadcopter controller is a gyro. The RX2635H uses an ITG-3205 from INVENSENSE. Accessing it is very simple as it uses the I2C interface (Two Wire Interface - TWI on the XMEGA) to read the X, Y and Z values of the gyro.
This post is part of a series
- Flashing new Firmware to Walkera RX/TX without UP02
- Decrypting receiver firmware
- Walkera receiver components
- Hello World firmware for the RX2635H board
- Serial port and external 16MHz oscillator
- Using the ITG-3205 mems gyro (this post)
- Walkera UP02 software clone: UP42
- Walkera RX2635H as generic development board?
- Walkera USB port
- Walkera + Arduino = Walkino
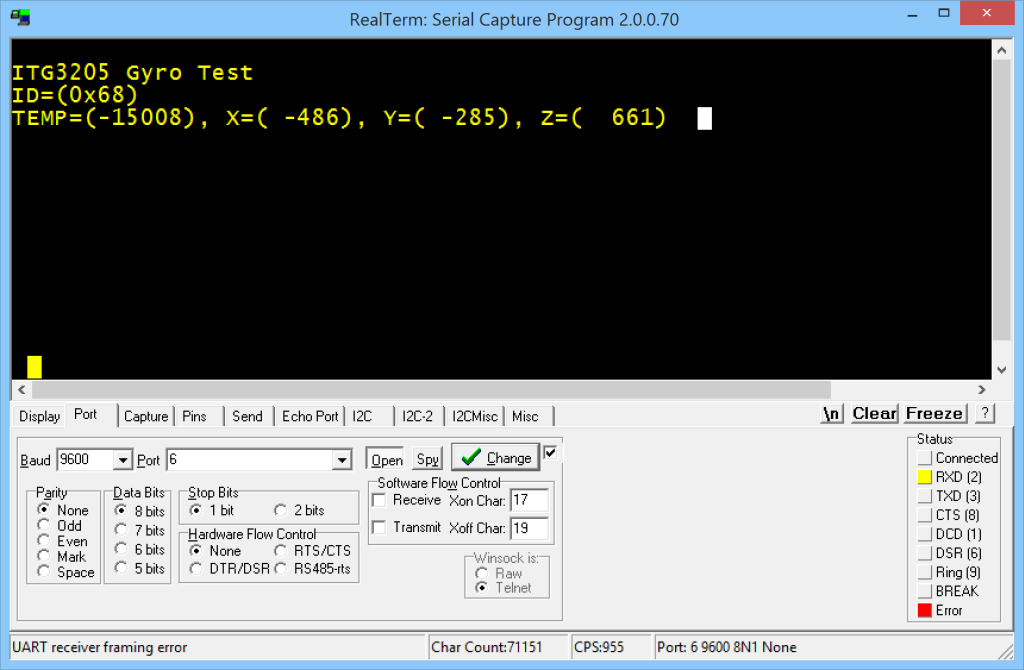
The ITG-3205 is connected to the XMEGA I2C (TWI) pins on PORTE. The following sample application reads the chip ID and the X, Y and Z values via I2C and prints it on the serial console. The ITG3-205 can have the 7bit I2C addresses 0×68 or 0×69 depending on pin 9. On the RX2635H board this pin is low (0) so it uses the I2C address 0×68.
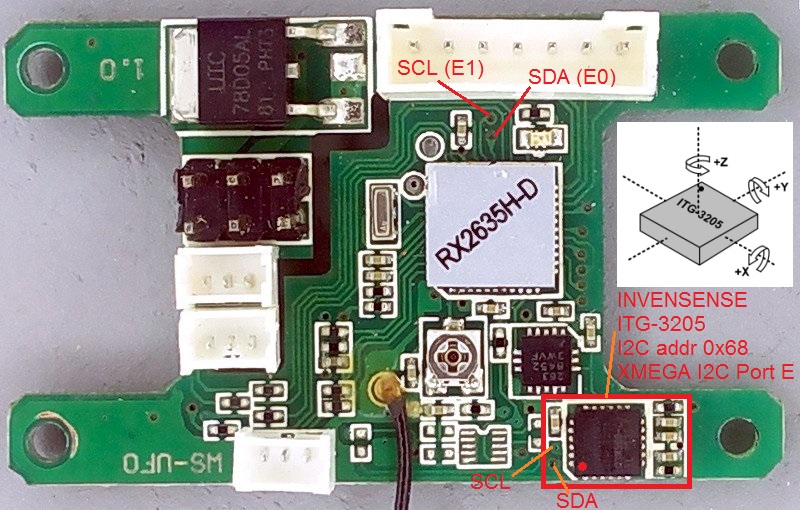
The RX2635H board image shows the location of the ITG-3205 and also its X, Y and Z sensitivity directions as well as the I2C data (SDA) and clock (SCL) lines.
Be sure to include a printf library (e.g. printf_min) in your project as it uses the printf C library function for output of the sensor values. You can download the complete AVR Studio solution here.
#include <avr/io.h>
#include <string.h>
#include <stdio.h>
// 16MHz CPU speed using external oscillator
#define F_CPU 16000000UL
char b = 1;
// Some defines and macros for calculating the I2C bus speed
// We use 100kHz for the I2C bus on XMEGA port E
#define I2C_E_BAUDRATE 100000
#define I2C_BAUD(F_SYS, F_TWI) ((F_SYS / (2 * F_TWI)) - 5)
#define I2C_E_BAUD I2C_BAUD(F_CPU, I2C_E_BAUDRATE)
// ITG-3205 can have the 7bit I2C addresses 0×68 or 0×69 depending on
// ITG-3205 pin 9. On the RX2635H board this pin is low (0) so it has
// the I2C address 0×68. The address 0×68 is shifted 1 bit to the
// left because of the I2C read/write bit which gives 0xD0.
#define ITG3205_ADDR 0xD0
// buffer for reading and writing data on the I2C bus
uint8_t buffer[8];
// ——————————————————————–
// 16MHz external resonator setup
void setupOsc(void)
{
//16MHz external crystal
OSC_XOSCCTRL = OSC_FRQRANGE_12TO16_gc | OSC_XOSCSEL_XTAL_16KCLK_gc;
//Enable external oscillator
OSC_CTRL |= OSC_XOSCEN_bm;
//Wait for clock stabilization
while(!(OSC_STATUS & OSC_XOSCRDY_bm));
// Selects clock system as external clock
// through change protection mechanism
CCP = CCP_IOREG_gc;
CLK_CTRL = CLK_SCLKSEL_XOSC_gc;
}
// ——————————————————————–
// red LED on PD4
void setupLED(void)
{
// PD4 = LED output
PORTD_OUTSET = PIN4_bm;
PORTD_DIRSET = PIN4_bm;
}
void LEDon(void)
{
PORTD.OUTCLR = PIN4_bm;
}
void LEDoff(void)
{
PORTD.OUTSET = PIN4_bm;
}
// ——————————————————————–
// 2nd serial port on PD6, PD7
void setupSerial(void)
{
// PD7 = RS232 TX output
PORTD_OUTSET = PIN7_bm;
PORTD_DIRSET = PIN7_bm;
// PD6 = RS232 RX input
PORTD_OUTCLR = PIN6_bm;
PORTD_DIRCLR = PIN6_bm;
// calculate 9600 baud
// BSEL = (16000000 / (2^0 * 16 * 9600) - 1 = 103,1666
// BSCALE = 0
// FBAUD = (16000000 / (2^0 * 16 * (103 + 1)) = 9615.384
USARTD1_BAUDCTRLB = 0;
USARTD1_BAUDCTRLA = 0×67; // 103
// Disable interrupts, just for safety
USARTD1_CTRLA = 0;
// 8 data bits, no parity and 1 stop bit
USARTD1_CTRLC = USART_CHSIZE_8BIT_gc;
// enable receive and transmit
USARTD1_CTRLB = USART_TXEN_bm | USART_RXEN_bm;
}
void sendChar(char c)
{
while( !(USARTD1_STATUS & USART_DREIF_bm) );
USARTD1_DATA = c;
}
static int sendCharStream(char c, FILE *stream)
{
if(c == ’n')
sendCharStream(’r', stream);
sendChar(c);
return 0;
}
void sendString(const char *text)
{
while(*text)
sendChar(*text++);
}
char receiveChar(void)
{
while( !(USARTD1_STATUS & USART_RXCIF_bm) );
return USARTD1_DATA;
}
int receiveCharStream(FILE *stream)
{
char c = receiveChar();
if(c == ’r')
c = ’n';
// Send to console what has been received, so we can
// see when typing
sendCharStream(c, stream);
return c;
}
// ——————————————————————–
// I2C interface on PORTE - connected to ITG-3205 gyro
void setupI2C_E()
{
TWIE.MASTER.CTRLB = TWI_MASTER_SMEN_bm;
TWIE.MASTER.BAUD = I2C_E_BAUD;
TWIE.MASTER.CTRLA = TWI_MASTER_ENABLE_bm;
TWIE.MASTER.STATUS = TWI_MASTER_BUSSTATE_IDLE_gc;
}
void writeI2C_E(uint8_t slaveAddr,
uint8_t addr, uint8_t *buffer, uint8_t len)
{
TWIE.MASTER.ADDR = slaveAddr;
while( !(TWIE.MASTER.STATUS & TWI_MASTER_WIF_bm) );
TWIE.MASTER.DATA = addr;
while( !(TWIE.MASTER.STATUS & TWI_MASTER_WIF_bm) );
for(uint8_t i = 0; i < len; i++)
{
TWIE.MASTER.DATA = buffer[i];
while( !(TWIE.MASTER.STATUS & TWI_MASTER_WIF_bm) );
}
TWIE.MASTER.CTRLC = TWI_MASTER_CMD_STOP_gc;
}
void readI2C_E(uint8_t slaveAddr,
uint8_t addr, uint8_t *buffer, uint8_t len)
{
uint8_t slaveReadAddr = slaveAddr | 0×01;
TWIE.MASTER.ADDR = slaveAddr;
while( !(TWIE.MASTER.STATUS & TWI_MASTER_WIF_bm) );
TWIE.MASTER.DATA = addr;
while( !(TWIE.MASTER.STATUS & TWI_MASTER_WIF_bm) );
TWIE.MASTER.ADDR = slaveReadAddr;
for(uint8_t i = 0; i < len; i++)
{
while( !(TWIE.MASTER.STATUS & TWI_MASTER_RIF_bm) );
if((i + 1) == len)
TWIE.MASTER.CTRLC |= TWI_MASTER_ACKACT_bm;
else
TWIE.MASTER.CTRLC &= ~TWI_MASTER_ACKACT_bm;
buffer[i] = TWIE.MASTER.DATA;
}
}
// ——————————————————————–
// main part
// use printf to print X,Y and Z values from the gyro to the
// serial port
FILE serialStream = FDEV_SETUP_STREAM(sendCharStream,
receiveCharStream, _FDEV_SETUP_RW);
int main(void)
{
int16_t T;
int16_t X;
int16_t Y;
int16_t Z;
setupOsc();
setupLED();
setupSerial();
stdout = stdin = &serialStream;
setupI2C_E();
printf(”\r\nITG-3205 Gyro Test\r\n”);
// read ID from gyro
// see page 23 of ITG-3205 manual
readI2C_E(ITG3205_ADDR, 0×00, buffer, 1);
printf(”ID=(0x%02x)\r\n”, buffer[0]);
while(1)
{
memset(&buffer, 0, sizeof(buffer));
// read Temperature, X, Y and Z values from gyro
// see page 27 of ITG-3205 manual
readI2C_E(ITG3205_ADDR, 0×1B, buffer, 8);
T = (buffer[0] << 8) + buffer[1];
X = (buffer[2] << 8) + buffer[3];
Y = (buffer[4] << 8) + buffer[5];
Z = (buffer[6] << 8) + buffer[7];
printf(”TEMP=(%6d), X=(%6d), Y=(%6d), Z=(%6d) \r”,
T, X, Y, Z);
if(b) LEDon(); else LEDoff();
b = !b;
}
}